Laser-Guided Flight System
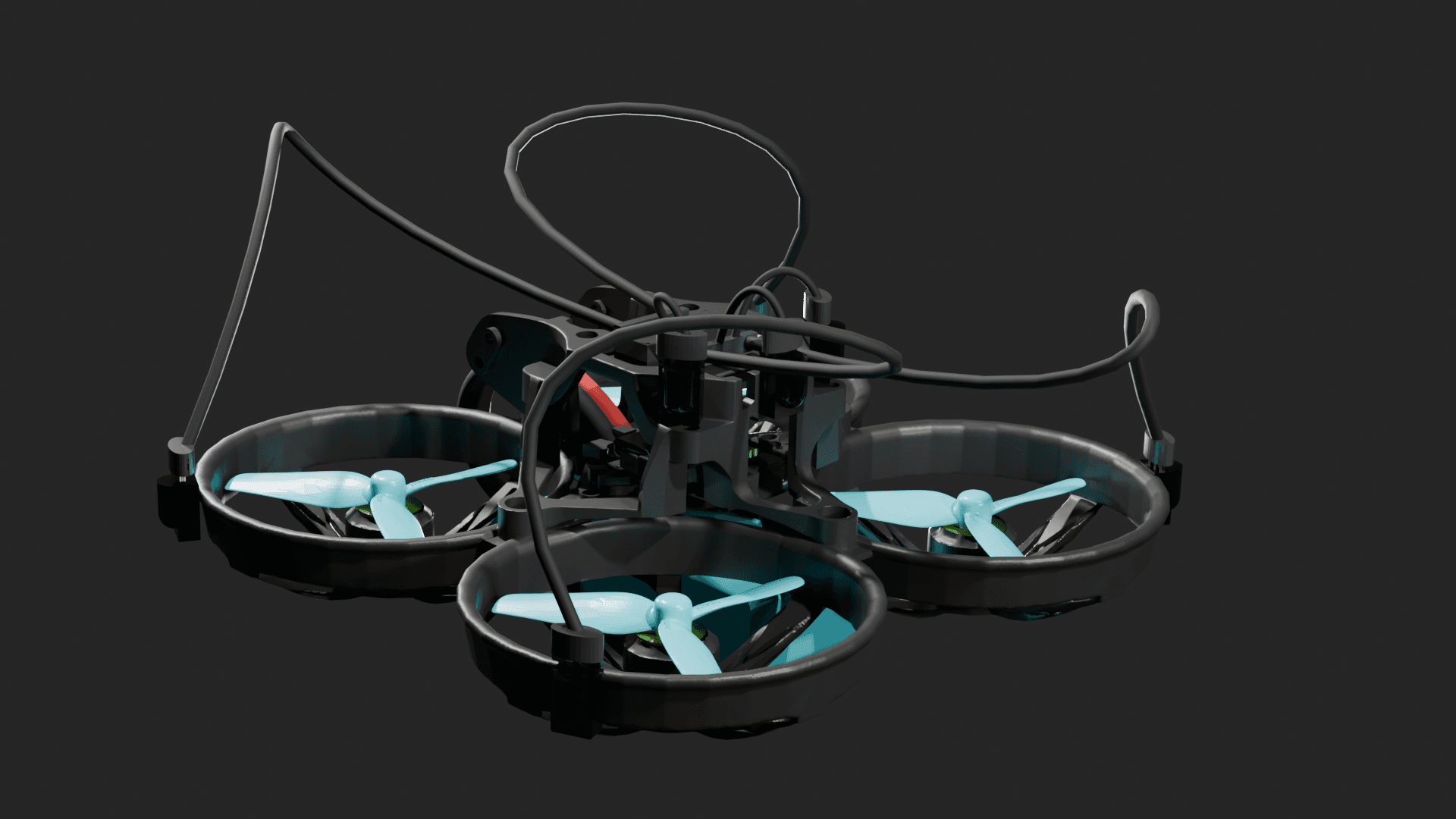
A drone prototype designed to detect a reflected laser target, confirm signal lock, and adjust its movement through sensing, control, and telemetry.
A drone prototype that tracks a reflected laser target, confirms signal lock, estimates direction through coarse-to-fine sensing, and uses ESP32-based telemetry and control to guide flight.
A drone prototype designed to detect a reflected laser target, confirm signal lock, and adjust its movement through sensing, control, and telemetry.
The front sensor array compares signal strength across multiple receivers to estimate where the reflected laser target is coming from.
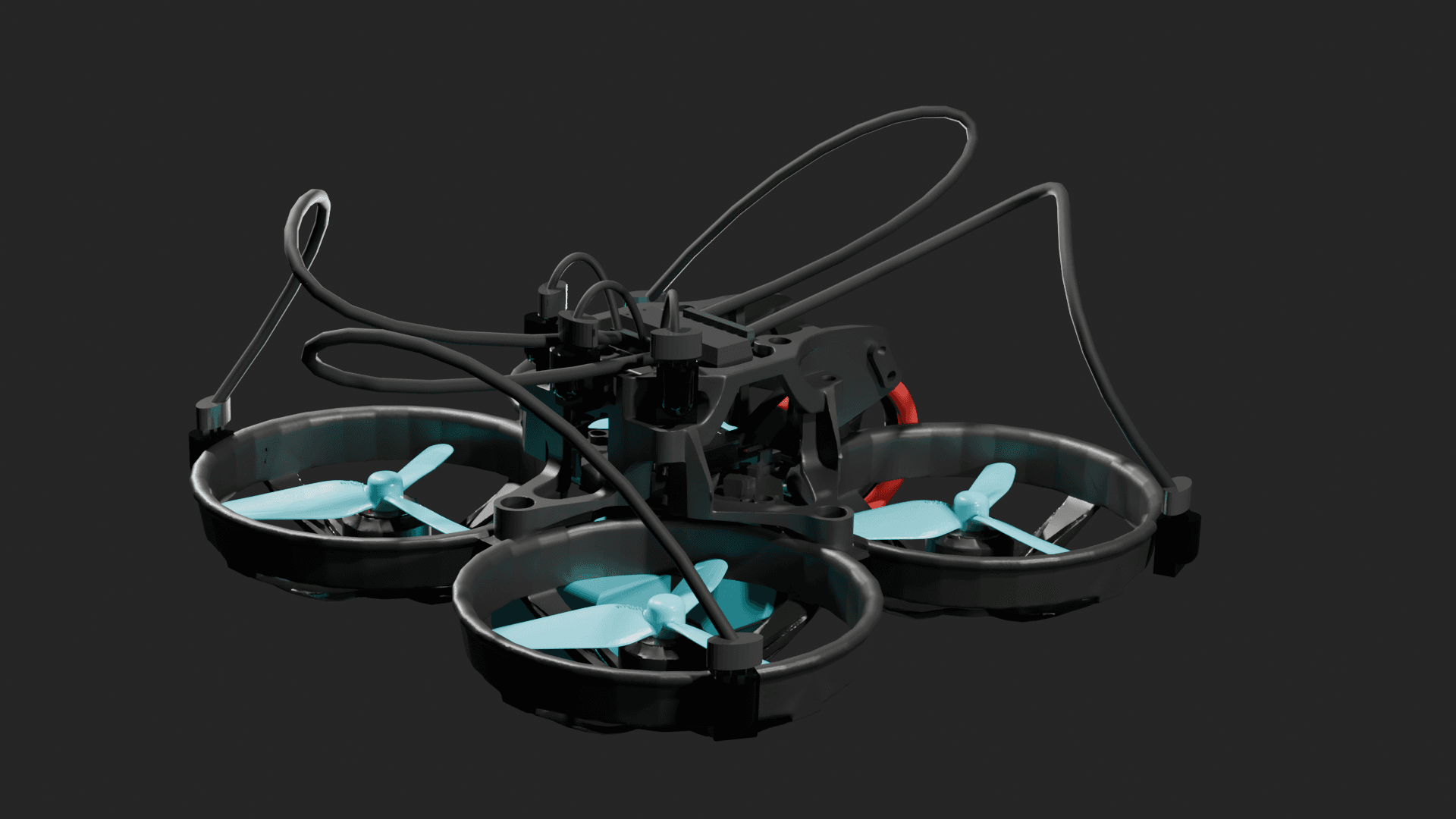
Four sensors are placed at the corners of the rotor guards to give the drone a rough baseline direction toward the reflected laser target before handing tracking over to the fine front array.
A connected ESP32 handles sensor data and telemetry, draws power from the drone battery, and communicates with the flight controller through MSP and Betaflight to send PID-stabilized control signals.
The rotor system turns control decisions into movement, keeping the drone responsive as it corrects toward the laser target.
Telemetry makes the drone easier to debug by showing lock state, sensor readings, and system behavior while the prototype is being tested.
From IR beacon detection to stabilized flight, this roadmap shows how the drone moves from raw sensor input through embedded processing, flight command generation, Betaflight stabilization, and live telemetry output.
This stage defines the target the autonomy stack is trying to align with before any control output is generated.
The coarse baseline prevents the system from treating every sensor equally once a stronger target direction appears.
The fine array narrows the correction loop once the target is already in the front tracking region.
Altitude awareness gives the companion controller another confidence signal before movement commands are packaged.
This is the companion controller layer where raw sensor readings become structured state.
The state machine keeps autonomy behavior explicit instead of allowing sensor noise to directly drive movement.
Commands stay at the intention layer, preserving a clean boundary between autonomy and stabilization.
The serial protocol boundary makes the autonomy controller replaceable without rewriting the stabilization stack.
Betaflight remains responsible for the timing-critical flight control work the ESP32 should not own directly.
Every movement becomes feedback for the next sensing frame, closing the autonomy loop.
The browser dashboard replaces serial-only debugging so the autonomy loop can be inspected while it runs.